Candidate: Job Angel Ledezma Pérez
Program: UFSC / PPGEAS
Date: October, 2012
Advisor: Victor Juliano De Negri
Co-advisor: Edson Roberto De Pieri
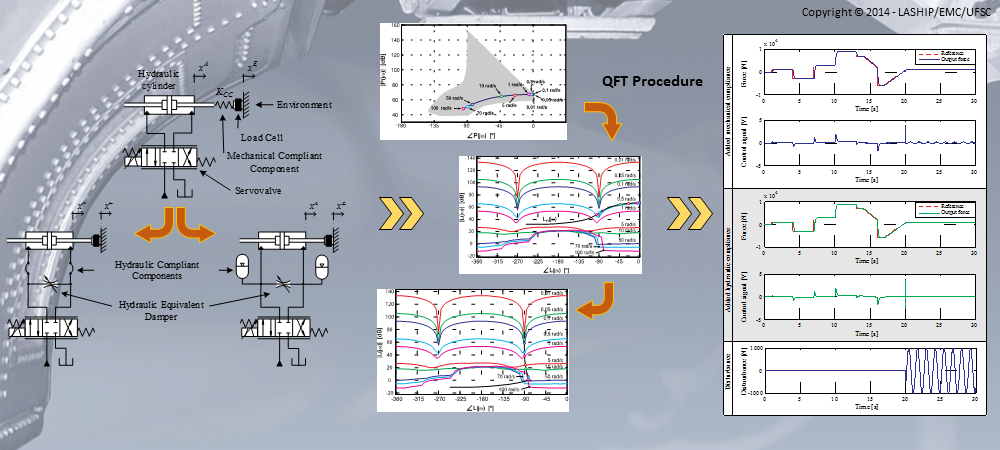
Abstract: This master thesis presents a technical and theoretical study on force control in hydraulic actuators. Two main cases of application are considered: force control of control static environments and force control of dynamic environments. The aim of this work is to design a controller that is capable of controlling the force applied to a specific environment. Some researches advise the inclusion of a flexible coupling between the actuator and the environment in order to isolate both dynamic and thus obtain a more stable and robust force output. To achieve such compliance with only hydraulic elements, this work proposes the reduction of the effective bulk modulus of the hydraulic fluid using high volumetric expansion houses or accumulators in order to reproduce the same elastic effect obtainable with mechanical springs. Since not bibliographical references were found to assist in the selection of such couplings for the force control, this work provides the methodologies for the calculation and selection of them. The results achieved in simulation show the advantages and applicability of these procedures. Comparatively, the force control is more complex than the position control, because the latter is independent of the dynamics of the environment, which was not the case of the force. Due to the complexity of the force control, various techniques proposing feasible solutions are found in the literature. The difference between them is based on theoretical complexity and their practical applicability. An efficient control technique is the one that can be developed more easily and produce the expected answers. In the case of this dissertation, the technique based on Quantitative Feedback Theory (QFT) was selected. This technique has some advantages over others. Since it works in the frequency domain, allows the designer to make a broader analysis of the problem and propose simple and effective solution. The inclusion of parametric uncertainties in the quantitative frequency analysis allows to develop robust controllers with fixed gain and low-order, which, in turn, can meet the performance specifications and robustness.
LEDEZMA, J. A. P. Controle robusto de força em atuadores hidráulicos aplicando a Teoria de Realimentação Quantitativa. 2012. Dissertação (Programa de Pós Graduação em Engenharia Mecânica), 205 p. Universidade Federal de Santa Catarina.