Candidate: Luciano Endler
Program: UFSC / PPGEAS / DAS
Date: October, 2014
Advisor: Victor Juliano De Negri
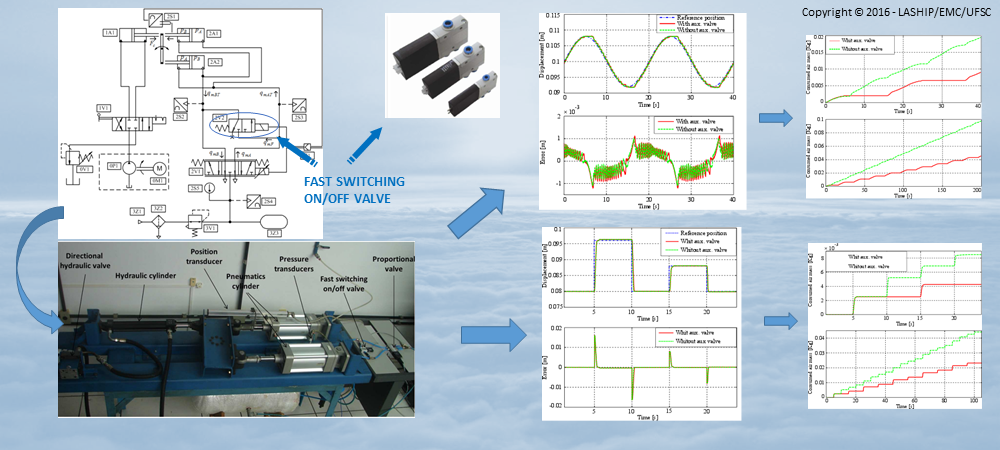
Abstract: This work presents a theoretical and experimental study of an alternative scheme to compressed air saving in pneumatic positioning systems with need move high loads. This new scheme adds a fast switching on/off valve in a feedback between the chambers of the pneumatic actuator. Firstly, the mathematical modeling was developed to understand the behavior of the system with an auxiliary on/off valve and to developing of the algorithm to compressed air saving. The mathematical modeling consists in equating the static and dynamic behavior of the main components, like fast switching on/off valve, proportional valve and pneumatic actuator system. The algorithm to compressed air saving, takes into account the pressure difference in the actuator chambers and the control signal reference to make decision to activation of valves. The system use two controllers, being the proportional valve signal from a PI controller with compensation of nonlinearity dead zone from a smoothed inverse and in the signal sent to auxiliary fast switching on/off valve, a Pulse Width Modulation technique associated with a PI controller was implemented. The theoretical and experimental results were obtained, firstly with the simulation of the mathematical model and after from tests conducted on test bench. The theoretical model presents a behavior very close to the real behavior. Having the validated model, one can obtain the pressure difference required to achieve a feedback between the chambers of the pneumatic actuator and achieve the positioning requirements of the system. This difference in pressure is an important parameter for the algorithm for compressed air saving. The experimental results showed that, with this configuration, until 47 % of compressed air can be saved to step response and of up to 54% for the sinusoidal trajectory tracking. The extra cost for the addition of auxiliary valve can be offset by compressed air saving. The payback period is of approximately 0.9 years to steps inputs and of approximately 0.72 years to the sinusoidal trajectory tracking, if the pressure transducers are available in the system.
Reference: ENDLER, L. Uma solução para economia de ar comprimido em sistemas de controle de posição pneumáticos. 2014. 135 p. Tese (Doutorado em Engenharia de Automação e Sistemas). Universidade Federal de Santa Catarina, Florianópolis.