Candidate: Cristiano Cardoso Locateli
Program: UFSC / POSMEC
Date: August, 2011
Advisor: Edson Roberto De Pieri
Co-advisor: Victor Juliano De Negri
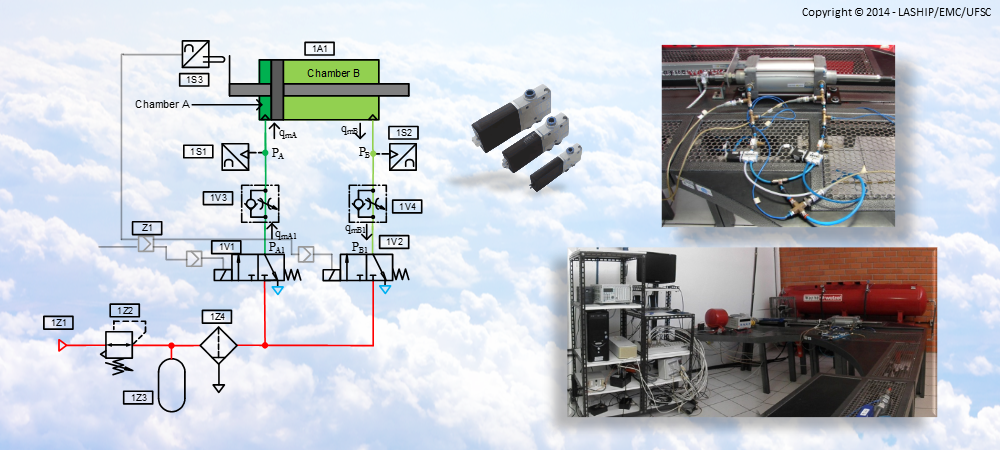
Abstract: This work presents the theoretical and experimental study of a servo-pneumatic system for position control, driven by a directional fast switching on/off valve, and the proposal of a new way of implementing two control methodologies for the system. Due to the costs that the use of proportional valves of pneumatic systems for position control represents, it has been observed that the costs of the system can be reduced through the use of directional fast switching on/off valves. Firstly, a brief introduction of servo-pneumatic systems driven by directional on/off valves is presented, followed by the mathematical modeling of the system, both to assist in the design of the controller and to implement the theoretical simulation model of the system. The mathematical modeling of the system consists of equating the main components such as the directional fast switching on/off valves, the flow control valve, the pipe that joins the two valves and the pneumatic actuator. Two control methodologies for the system are proposed. The first one is a PID controller associated to the Pulse-width modulation technique (PWM), where a compensation of the saturation zone of the valve is done. The second control technique is based on a variable structure control by sliding modes. In the results section, studies about the dynamic behavior of the directional on/off valve are presented, as well as comparisons between different frequencies for PWM operation for step response and sinusoidal trajectory tracking, the behavior of the sliding mode control with or without compensation of the chattering phenomenon and a comparative study between the two methodologies of control and the theoretical model with the experimental results. From the results obtained it was possible to understand better the behavior of the directional fast switching on/off valve. The servopneumatic system for position control achieved low positioning errors for both methodologies of control. The theoretical model showed a similar behavior to the actual behavior of the system. Concluding, the directional fast switching on/off valves are shown to be a good alternative to proportional valves because of their low costs and low positioning errors.
LOCATELI, C. C. Modelagem e desenvolvimento de um sistema de controle de posição pneumático com acionamento por válvulas on/off. 2011. Dissertação (Programa de Pós Graduação em Engenharia Mecânica), 114 p. Universidade Federal de Santa Catarina.