Candidato: João Pedro Duarte da Silva
Programa: UFSC / POSMEC
Data: Novembro de 2019
Orientador: Victor Juliano De Negri
Coorientador: Alexandre Orth
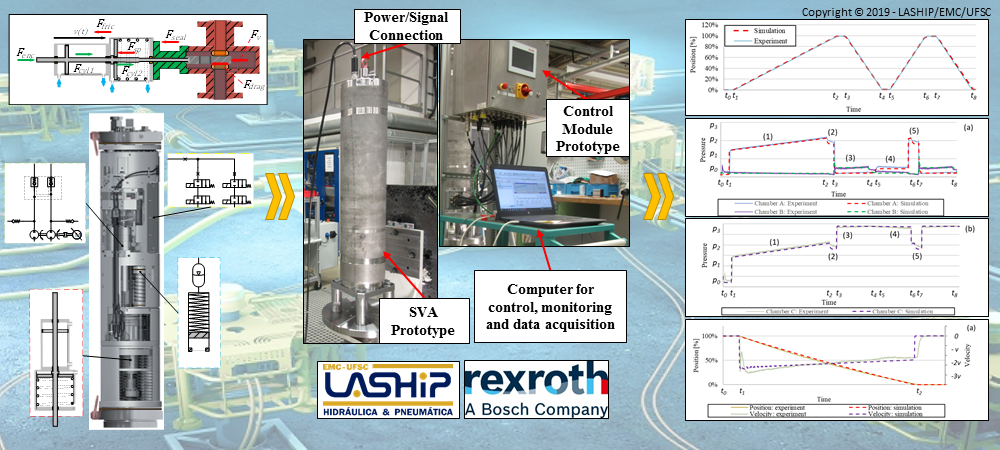
Resumo: Ultimamente, em sistemas submarinos de produção de petróleo e gás, o uso de sistemas totalmente elétricos (All-Electric Systems – AES) aumentou devido às suas várias vantagens em comparação com suas contrapartes eletro-hidráulicas convencionais, como redução nos custos de instalação e operacionais, resposta rápida do sistema, redução no diâmetro de cabos umbilicais, alto nível de flexibilidade operacional e projeto sustentável. Neste contexto, um atuador eletro-hidrostático (Electro-Hydrostatic Actuator – EHA) – composto por um servomotor, uma transmissão hidrostática e um cilindro hidráulico com uma mola para efetuar a função de falha-segura – trata-se de uma solução que pode ser aplicada a sistemas de produção totalmente elétricos, preservando as melhores características de sistemas electro-hidráulicos convencionais, como confiabilidade, compacidade, robustez e densidade de energia em um projeto sustentável e de interface totalmente elétrica. Neste trabalho, um atuador de válvula submárina eletro-hidrostático – desenvolvido especialmente para operar com válvulas gaveta com diâmetro nominal de 2 polegadas em profundidades de até 3.000 metros – é modelado matematicamente, simulado numericamente e validado pelo confronto de seus resultados com os de experimentos em um protótipo. O modelo validado é então simulado, com um modelo de válvula gaveta, em vários cenários diferentes e avaliado em termos de funcionalidade e consumo energético. Os resultados obtidos através das simulações realizadas apresentam um sistema com comportamento robusto durante as operações nominais de abertura e fechamento da válvula gaveta, bem como durante as funções de falha segura, em todos os cenários avaliados. O EHA demonstra ter baixo consumo energético, com a possibilidade de se predefinir um consumo máximo de potência, o qual é controlado pela limitação da velocidade angular do seu servomotor. As influências da profundidade de instalação do equipamento e da pressão do poço no comportamento do sistema também são investigadas.
Referência: SILVA, J.P.D. Experimental and Theoretical Analysis of an Electro-Hydrostatic Actuator for Ultra Deepwater Applications. 2019. 115 p. Dissertação de Mestrado em Engenharia Mecânica. Universidade Federal de Santa Catarina, Florianópolis.