Candidato: Job Angel Ledezma Pérez
Programa: UFSC / PPGEAS
Data: Outubro de 2012
Orientador: Victor Juliano De Negri
Coorientador: Edson Roberto De Pieri
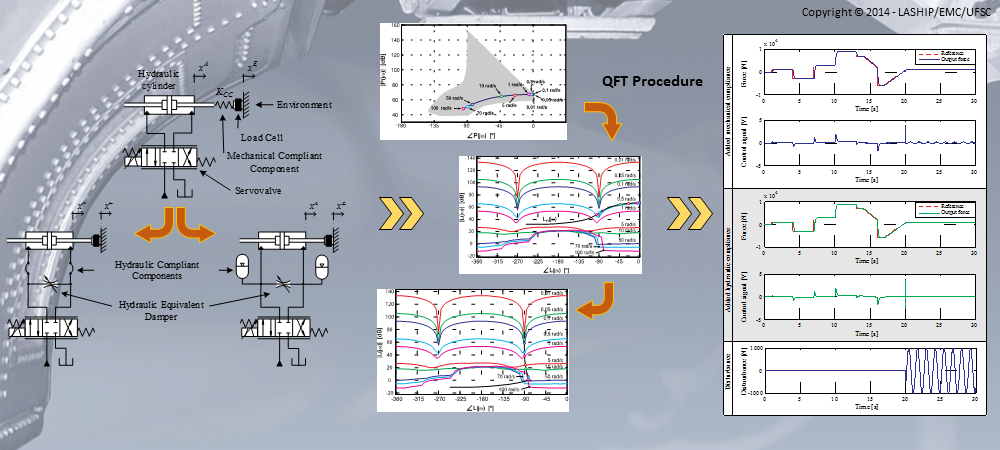
Resumo: Neste trabalho apresenta-se um estudo técnico-teórico relativo ao controle de força em atuadores hidráulicos. Consideram-se dois casos principais de aplicação: o controle de força sobre meios estáticos e o controle de força sobre meios dinâmicos. O objetivo geral do trabalho é de projetar um controlador que seja capaz de controlar a força aplicada sobre um meio específico. Algumas pesquisas propõem a inclusão de um acoplamento flexível entre o atuador e o meio com o intuito de isolar as dinâmicas de ambos e obter, assim, uma saída de força mais estável e robusta. Para conseguir tal complacência com elementos unicamente hidráulicos, propõe-se a diminuição do módulo de compressibilidade efetivo do fluido hidráulico através da utilização de mangueiras de alta expansão volumétrica ou de acumuladores a fim de reproduzir o mesmo efeito elástico obtido com molas mecânicas. Em vista de não ter-se encontrado referências bibliográficas específicas que auxiliem na seleção de tais acoplamentos para a realização do controle de força, o presente trabalho estabelece as metodologias para o cálculo e seleção dos mesmos. Os resultados conseguidos em simulação mostram as vantagens e a aplicabilidade de tais procedimentos. Comparativamente, o controle de força é mais complexo do que o controle de posição, devido ao último ser independente da dinâmica do meio, fato que não acontece no caso da força. Dada a complexidade do controle de força, diferentes técnicas que propõem soluções factíveis, são encontradas na literatura. A diferença entre elas baseia-se na complexidade teórica e na aplicabilidade prática que possuem. Uma técnica de controle eficiente é aquela simples de ser desenvolvida e que produza as respostas esperadas. Para o caso da presente dissertação, optou-se pela técnica fundamentada na Teoria de Realimentação Quantitativa (Quantitative Feedback Theory – QFT). Esta técnica apresenta algumas vantagens em relação a outras. O fato de trabalhar no domínio da frequência possibilita ao projetista realizar uma análise mais ampla do problema, propondo soluções simples e eficazes. A inclusão das incertezas paramétricas dentro da análise quantitativa em frequência permite desenvolver controladores robustos, com ganhos fixos e de baixa ordem; as quais, por sua vez, conseguem atender as especificações de desempenho e robustez.
LEDEZMA, J. A. P. Controle robusto de força em atuadores hidráulicos aplicando a Teoria de Realimentação Quantitativa. 2012. Dissertação (Programa de Pós Graduação em Engenharia Mecânica), 205 p. Universidade Federal de Santa Catarina.